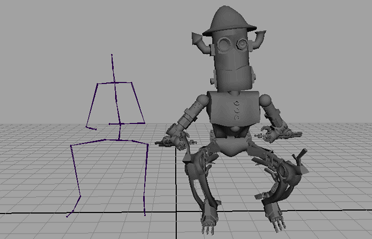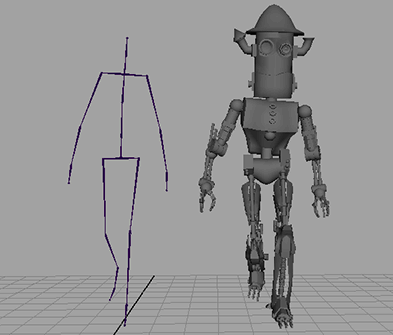
使用资源,还可以在由不同组件类型和不同配置组成的模型之间传递属性。在下面的示例中,骨架的步行循环传递到了不含关节的机器人模型中。
但是,机器人的枢轴点与骨架的关节并不是完全匹配。例如,机器人肘部由三个部分组成,而其中每一部分都仅可向一个方向旋转。骨架的肘部是可向三个方向旋转的单一关节。
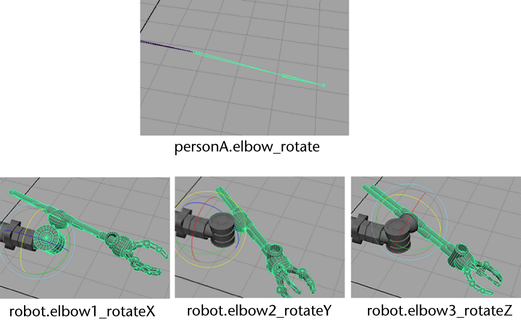
若要确保机器人正确地模仿骨架,必须将每个独立的肘部旋转都作为资源肘部旋转的一个轴进行发布。
但是,仅轴对轴地发布旋转也无法获得理想的效果。这是因为每个肘部部位的轴与骨架肘部关节相应的轴不一致。
若要解决此问题,必须在发布时对属性进行重命名。通过将骨架肘部的 rotateX 作为机器人资源的 rotateY 发布,可以确保机器人肘部的移动与骨架肘部的移动相匹配。
 。
。
重复上述步骤,将 elbow2 的 rotateY 映射到资源的 rotateZ,并将 elbow3 的 rotateZ 映射到资源的 rotateX。
 键并在 robot_AST 上单击鼠标左键 (
键并在 robot_AST 上单击鼠标左键 ( )。
。
)。
。
此时将显示“传递属性值选项”(Transfer Attribute Values Options)窗口。
启用“值”(Values)。之所以能够将步行循环从骨架复制到机器人,是因为在资源级别上这两个对象的显示相同,而不用考虑二者的内部组件。