
Select from the following constraint types:
The Point constraint (called a point-to-point constraint in the Bullet Physics library) limits the translation so that pivot points between the two rigid bodies match in world space. You can use the Point constraint to create effects, such as a chain-link, or to pin objects together.
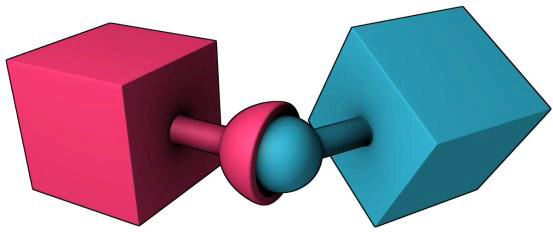
The Point constraint supports the following attributes:
The Hinge constraint restricts the translation and two additional angular degrees of freedom, so the body can only rotate around one axis. The hinge axis is defined by the Z axis of the constraint. This constraint is useful for representing doors or wheels rotating around an axis. The user can specify limits and motor settings for the hinge.
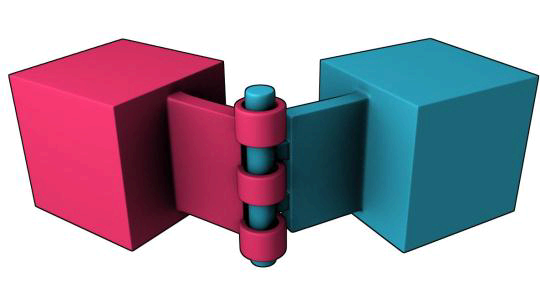
The Hinge constraint supports the following attributes:
The Slider constraint allows rigid bodies to rotate around one axis and translate along the same axis. The slide axis is defined by the Z axis of the constraint.
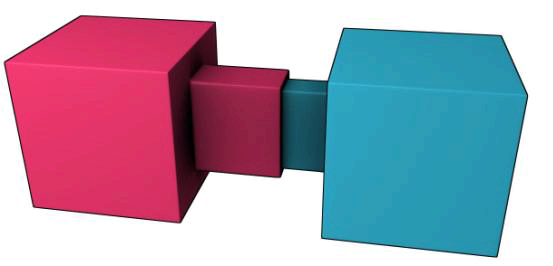
The Slider constraint supports the following attributes:
For ragdolls, the Cone-Twist constraint is useful for limbs like the upper arm. It is a special point-to-point constraint that adds cone and twist axis limits. The X axis serves as twist axis.
The Cone-Twist constraint supports the following attributes:
The Six Degrees-Of-Freedom (SixDOF) constraint can emulate a variety of standard constraints if each of the six Degrees of Freedom (DOF) is configured. The first 3 DOFs axis are linear axis, which represent the translation of rigid bodies, while the latter 3 DOFs axis represent the angular motion. Each axis can be locked, free, or limited. By default, all axes are unlocked.
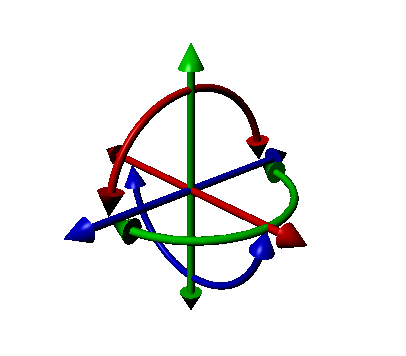
The Six Degrees-Of-Freedom constraint supports the following attributes:
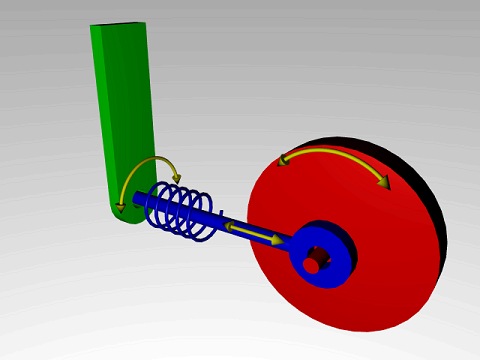
The Spring Hinge has three degrees-of-freedom. These include two rotational degrees-of-freedom around Z (Axis 1) and X (Axis 2), and one translational along Z (Axis 1) with a suspension spring. A use-case example of a Spring Hinge constraint is the steering wheel of a car, where one axis allows the wheel to be steered while the other axis allows the wheel to rotate. For this case, you need to rotate the spring hinge -90 in X to align Axis 1 with Y.
The Spring Hinge constraint has an anchor point for Axis 2, which is specified by the position of the constraint. Axis 1 is specified relative to body 1. This would be the steering axis if body 1 is the chassis. Axis 2 is specified relative to body 2 and is perpendicular to Axis 1 (along X). This would be the wheel axis if body 2 is the wheel. Axis 1 (along Z) can have springs as well as angular and linear limits, but Axis 2 (along X) is free. You cannot have springs and motors enabled at the same time. If you want to drive Axis 2, modify the X Torque Impulse of body 2.
The Spring Hinge constraint supports the following attributes:
The Spring Six Degrees-Of-Freedom (SpringSixDOF) constraint is a variant of the Six Degrees-of-Freedom constraint that includes the addition of springs for each of the degrees of freedom. Springs and motors cannot be combined on this constraint.
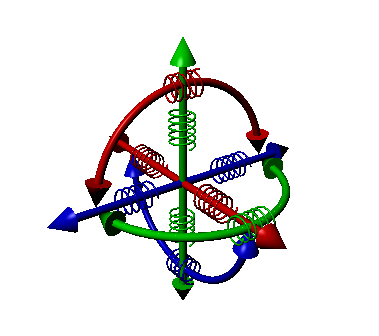
The Spring Six Degrees-Of-Freedom constraint supports the following attributes:
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License







