在 Maya 中,可以使用“运动学”在动画期间移动角色或设置角色的姿势。“运动学”是一个可指定骨架运动的系统。Maya 中的运动学分为两种类型:正向运动学 (FK) 和反向运动学 (IK)。每种运动学最适合特定的运动类型。
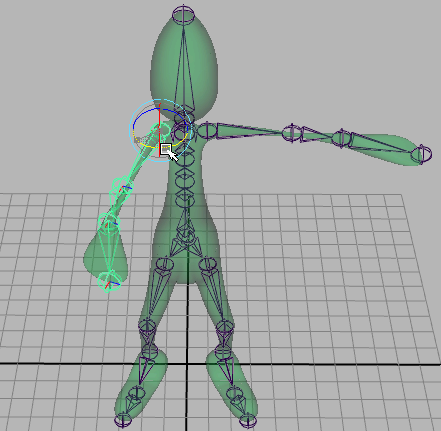
使用正向运动学,可以旋转骨架中的各个关节并设置其关键帧。正向运动学适用于创建详细的弧运动,例如:两足动物的肩部关节的旋转。
使用反向运动学,可以平移 IK 控制柄并设置其关键帧,还可以设置其 IK 链关节变换和旋转的姿势和动画。IK 控制柄的起始关节和末关节之间的所有关节均由 IK 控制柄驱动。反向运动学适用于创建目标定向的运动,例如:两足动物伸手去取某个对象的运动。
除了单独使用 FK 或 IK 设置骨架的关节的姿势和动画,还可以在同一关节上混合 FK 和 IK 动画。
使用正向运动学 (FK),可以旋转或移动各个关节,以设置关节链的姿势和动画。请参见使用 FK 设置关节姿势。移动关节时,将影响该关节及其层次下方的任何关节。例如,如果需要关节链达到空间中的特定位置,则必须分别旋转每个关节,以便关节链可以达到该位置。为此,请旋转和平移关节链的父关节,然后旋转和平移下一个关节,直至对关节链中的每个关节均执行同样的操作为止。使用正向运动学设置骨架动画时,Maya 将从根关节开始对关节旋转插值,然后对根关节的子关节进行插值,直至对骨架层次中的每个关节均执行同样的操作为止。
正向运动学适用于创建非定向运动(例如肩部关节的旋转),且不得用于为复杂的大型骨架设置动画。此外,正向运动学很难用来指定目标定向运动。例如,如果使用 FK 设置骨架的动画,则当身体向前移动时,脚很难保持静止不动。此外,如果需要手移动到空间中的某个位置,则通常无需考虑如何旋转手臂中的所有关节。
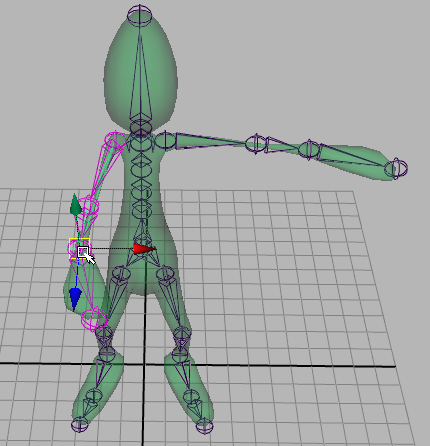
使用反向运动学 (IK),可以移动 IK 控制柄,以设置整个关节链的姿势。IK 控制柄是一个可以选择并移动以影响其指定关节的对象。请参见 IK 控制柄。具有 IK 控制柄的关节链称为 IK 链。使用 IK 控制柄设置关节链的姿势和动画时,IK 解算器将自动旋转 IK 链中的所有关节。IK 解算器是指设定 IK 控制柄的位置时、Maya 用来计算 IK 链中所有关节的旋转的工具。请参见 IK 解算器。
对于目标定向的运动,反向运动学比正向运动学更直观,因为您可以重点关注关节链要达到的目标,而无需考虑链中的每个关节应如何旋转。






