この時点で、メカニカル アームとカーゴ ボックスがアニメーション用に完全にセットアップされています。あとは、アームにポーズおよびキーフレームを設定するだけです。キーフレームを設定する前に、シーンのアクションを計画する必要があります。
通常、アクションの計画では、簡単な絵コンテをスケッチして、コンポーネントごとにアクションの簡単なタイムラインを書き出します。このレッスンでは、簡単なバージョンが用意されています。アクションに関する基本的な前提計画を以下に示します。
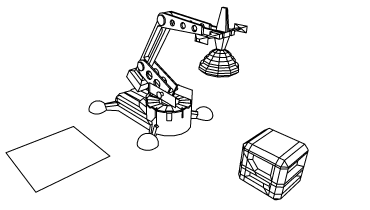
- カーゴ ボックスがメカニカル アームのすぐ前に配置されます。
- メカニカル アームが伸びて、カーゴ マグネットをカーゴ ボックスの上に直接接触させます。
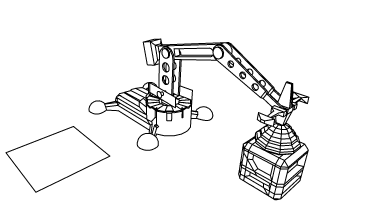
- メカニカル アームがカーゴ ボックスを持ち上げながら上に伸びて、横に回転します。
- メカニカル アームがボックスを降ろして、新しい位置に置きます。
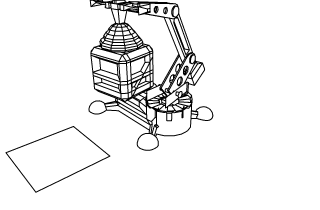
- メカニカル アームが新しい位置にカーゴ ボックスを残したまま上に伸び、逆に回転して元の位置に戻ります。
下の表は、指定したキーフレームでオブジェクトに発生するアクションを分類したものです。
| フレーム |
メカニカル アーム |
カーゴ ボックス |
1
|
縮んだ状態
|
初期位置
|
30
|
上に伸びきった状態
|
初期位置
|
60
|
カーゴ マグネットがカーゴ ボックスの上に乗るように下ろされた状態
|
初期位置
|
80
|
カーゴ ボックスを持ち上げて伸びきった状態
|
カーゴ ボックスがメカニカル アームで持ち上げられた状態
|
100
|
SwivelBase がアームを持って横に回転した状態
|
カーゴ ボックスがメカニカル アームに付随して移動した状態
|
120
|
カーゴ ボックスを持ってサーフェス上の 2 番目の位置まで下がった状態
|
カーゴ ボックスがメカニカル アームに付随して 2 番目の位置に下がった状態
|
140
|
伸びきった位置まで上がった状態
|
2 番目の位置
|
160
|
SwivelBase がアームと付随して元の位置まで回転した状態
|
2 番目の位置
|
180
|
縮んだ状態
|
2 番目の位置
|
メカニカル アームにポーズを設定するために、ArmControl ノードと SwivelBase ノードのいずれかを選択して、以下のようにポーズを設定するコンポーネントに応じてキーフレームを設定します。
- ArmControl がメカニカル アームの動きを制御します。
- SwivelBase がアームの回転を制御します。
- CargoBox の位置がペアレント コンストレインのウェイトに基づいて決まります。